- Home
- Industries
- Train & Rail
- Digital Solutions for Rail & Track
- Project SmarTram
- Home
- Industries
- Train & Rail
- Digital Solutions for Rail & Track
- Project SmarTram
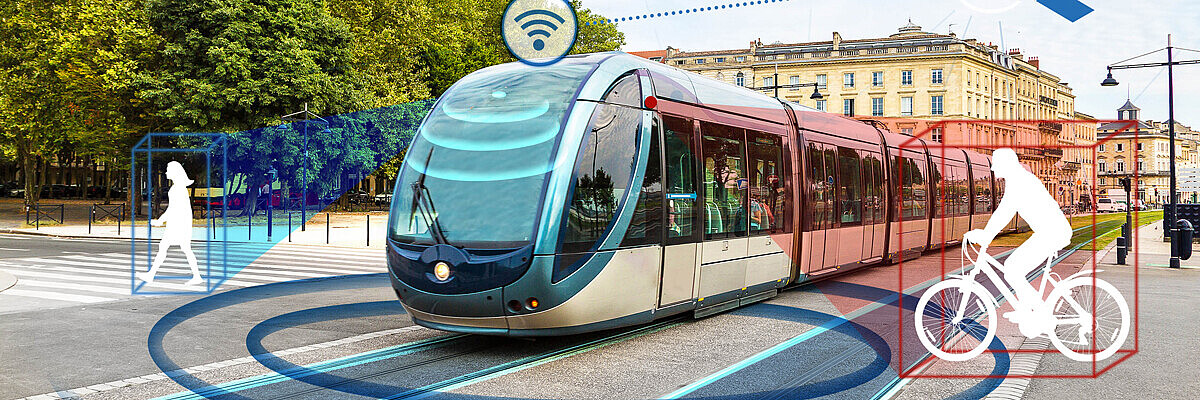
SmarTram
Autonomous vehicles are a central component of all future mobility concepts. While the automated operation of streetcars in closed systems has been a reality for decades, we are now working on safe operation in an open infrastructure, i.e. the normal operation of an autonomous streetcar in urban traffic. Far more demanding technological requirements have to be met here: An autonomous vehicle - comparable to a human driver - must reliably recognize and interpret complex driving situations and react to them independently.
As part of the BMWK-funded joint project SmarTram (autonomous transportation system for urban traffic with increased passenger comfort), we are working with our project partners* to develop a system demonstrator for an intelligent streetcar.The aim of the project is to identify the technological challenges of autonomous streetcar driving under real operating conditions and to develop and test innovative solutions for safe operation. The aim is to transfer findings from the automotive sector to rail-bound vehicles.
Safeguarding highly automated systems
We evaluate the AI-based object recognition of the sensor setup and validate the highly automated streetcar. To ensure safe operation in an urban environment, a combined automation solution consisting of vehicle-based and infrastructure-based sensor technology is being implemented. Different sensor types have to be coordinated with each other in order to ensure a valid and robust perception of the traffic environment and the vehicle interior by means of data fusion. The system components are networked using cloud computing in segments via a wireless internet connection (V2X communication via 5G). Interference-free and IT-secure communication is of crucial importance here.
Our technological focus is on
Communication & networking
An important milestone has been reached in our SmarTram research project: the test vehicle has been equipped with 5G communication technology and the first test runs have been successfully completed. Our main focus here is on a resilient system architecture and the networking of relevant participants via 5G to ensure safe operation in an urban environment.
What requirements must a networked streetcar meet during the journey and how can the required information be transmitted securely to the vehicle? To answer these questions, we worked with our partner company Marc Triefelder - IT Engineeringwe put the communication technology in the CVAG streetcar railcar into operation and configured a network between the test vehicle, teleoperator, a prototype control center and infrastructure-based sensor technology via 5G mobile radio. The camera streams and data packets are transmitted via encrypted VPN connections - resilient and secure.
The implemented 5G setup was tested during initial test runs on a CVAG route section and latency times and availability of the 5G communication technology used were continuously monitored and recorded. In the further course of the project, various measures could be taken to optimize the performance and security aspects of 5G networking, especially using slicing technology. By implementing these measures, the SmarTram project could not only significantly increase the performance and security of 5G networking, but also set pioneering standards for autonomous streetcar operation in urban environments.
When implementing the information security concept, we are following the guidelines of the BSI. An IT-secure setup will be set up as part of the project. Further recommendations for action for a series introduction will be derived for the streetcar operator.
Human factors
Together with our project partner Hörmann Vehicle Engineering, we are working on the future design and ergonomics of an automated streetcar. If fully automated operation is realized, the classic driver's workplace in the streetcar can in principle be eliminated. As a result, the role of the traditional streetcar driver will increasingly change in the direction of service-oriented personnel or teleoperators.
Figures from the Federal Statistical Office show that the victims of streetcar accidents are predominantly other road users. For this reason, the focus in the development of the exterior is specifically on the interaction of road users. As eye contact with the streetcar driver is not possible in automated operation, external HMIs (eHMIs) were developed which, in addition to the warning bell, enable interaction with the automated system on a visual path.
For the design of the interior, the focus is primarily on the appropriate presentation of information for passengers and building trust during the driverless journey. The design of the SmarTram vision vehicle will be presented to the public for the first time at CVAG's open day. The tour around and through the vision vehicle will take place with the help of virtual reality.
More about Human System Integration
Scenario-based simulation
IABG relies on virtual simulations to support the project partners during development and as part of the verification process. A section of the CVAG route was digitized in order to be able to verify modelled vehicle reactions in a familiar environment. The modeled streetcar covers the vehicle dynamics properties (bogies, wheel-rail contact). For the simulation of automated operation, sensor models and the speed controller were integrated and validated in the further course of the project. In addition, the realized simulation environment for automated streetcar operation enables further testing using software and hardware-in-the-loop methods.
Evaluation of object recognition
The obstacle detection algorithms developed by project partner FusionSystems are evaluated and tested by IABG. For the evaluation of AI-based object recognition, we use the safeAI kit, which has been developed over many years and conforms to relevant AI standards. The safeAI kit is used to generate statements on performance, uncertainty, robustness, explainability and the underlying data set of the AI model at an early stage in order to optimize the algorithm. In addition, a methodology and framework is being developed based on the safeAI kit, which can be used to analyze and evaluate the detection of radar and lidar sensors. Initial test runs with sensor data and an integrated algorithm for lidar obstacle detection have already been successful.
More about safeAI
Testing and verification
Based on the "Dienstanweisung für den Fahrdienst mit Straßenbahnen" (DFStrab), use cases for automated streetcar operation were defined and automation requirements derived.
The project partner Hörmann provides a requirements management tool in which the specifications of an automated streetcar are digitally recorded and configurations can be traced back in a traceable manner. In the context of verification, the tool is also used to create and document the test planning for the subsystems and the integrated overall system.
For validation and validation, the Technical Safety Plan (TeSiP) was modified and further developed together with Hörmann Vehicle Engineering for the real demonstrator in accordance with EU No. 402/2013 (CSM RA). The further safety argumentation of the automated operation is carried out taking into account the requirements of ISO 21448. We pursue the goal of determining and securing the performance and operating limits of the SmarTram by means of simulation and real tests. To ensure safety at all times, there is always an accompanying driver in the streetcar during test operation who can intervene and override at any time.
More about autonomous driving
How can we help you?
Please fill in the form and we will get in touch with you as soon as possible.
This section contains third-party content that you can view with a single click.
By loading the form, personal data may be transmitted to the third-party provider. You can find more information in our privacy policy