Testkreuzung
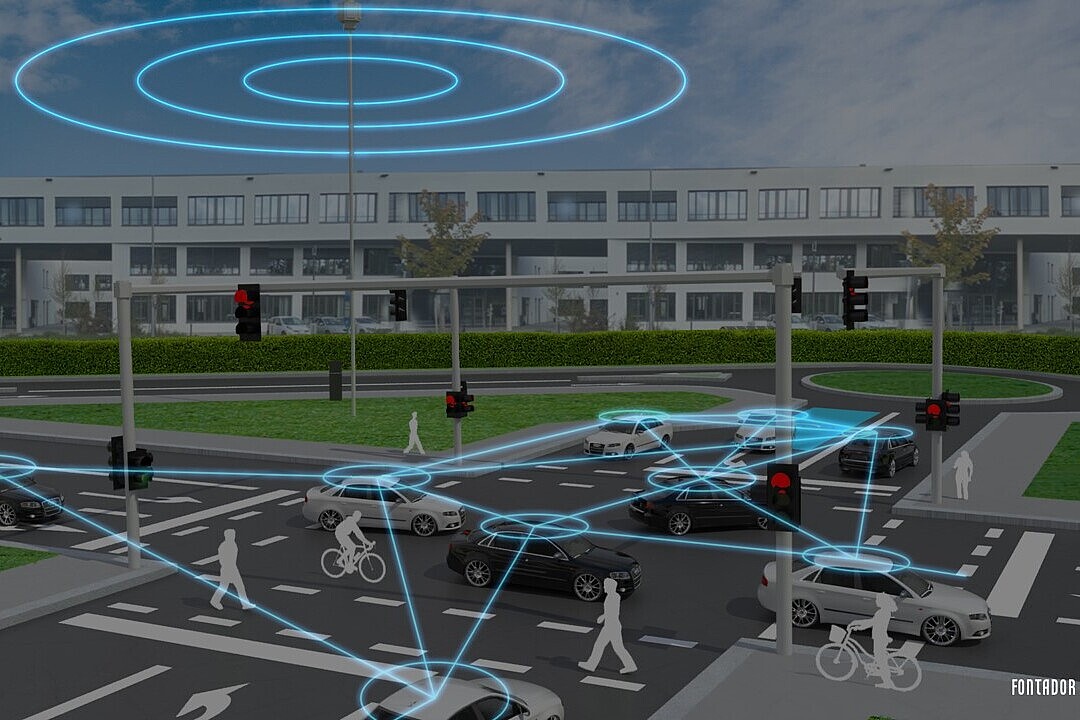
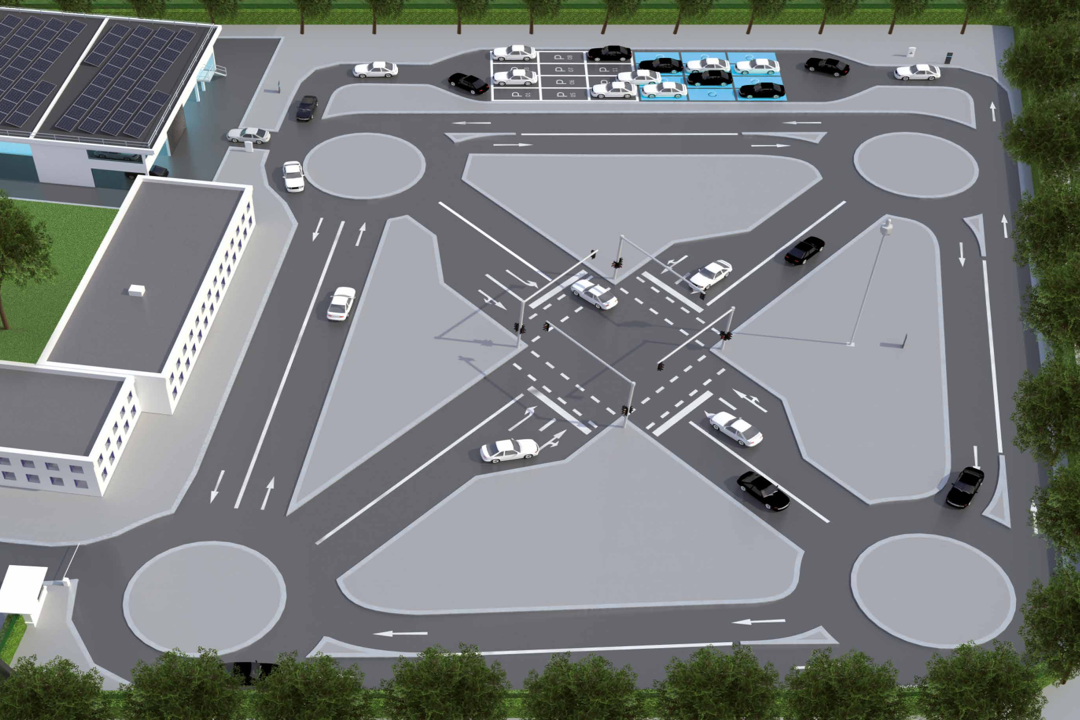
Im Mittelpunkt des Testfelds steht eine Kreuzung inklusive der benötigten Infrastruktur aus Verkehrsflächen, Lichtsignalanlage (LSA), Sensorik sowie
V2X-Kommunikation. Die Testkreuzung dient dazu, automatisierte und vernetzte Fahrzeuge (AVF) in einem abgesicherten Umfeld testen und validieren zu können, bevor die entwickelten Fahrzeugsteuerungs-Algorithmen im realen Straßenverkehr evaluiert, erprobt und eingesetzt werden. Dabei werden die zum Einsatz kommenden KI-Algorithmen, KI-Modelle und Datensätze analysiert und deren Konformität mit Standards eines eigenen Datenanalysetools überprüft (SafeAI).
Ergänzt werden die Verkehrsflächen durch eine intelligente, über offene Schnittstellen variabel ansteuerbare, bewegliche Lichtsignalanlage sowie eine umfassende Detektionssensorik zur Erfassung und präzisen Positionsbestimmung aller (auch nicht vernetzter Fußgänger und Radfahrer) Verkehrsteilnehmer.